From idea to prototype.
Each case study walks through the problem, the approach, and what shipped: mechanical design, controls, simulation, and real-world results.
Technical Projects
Applied engineering work from internships, research, and capstone projects.
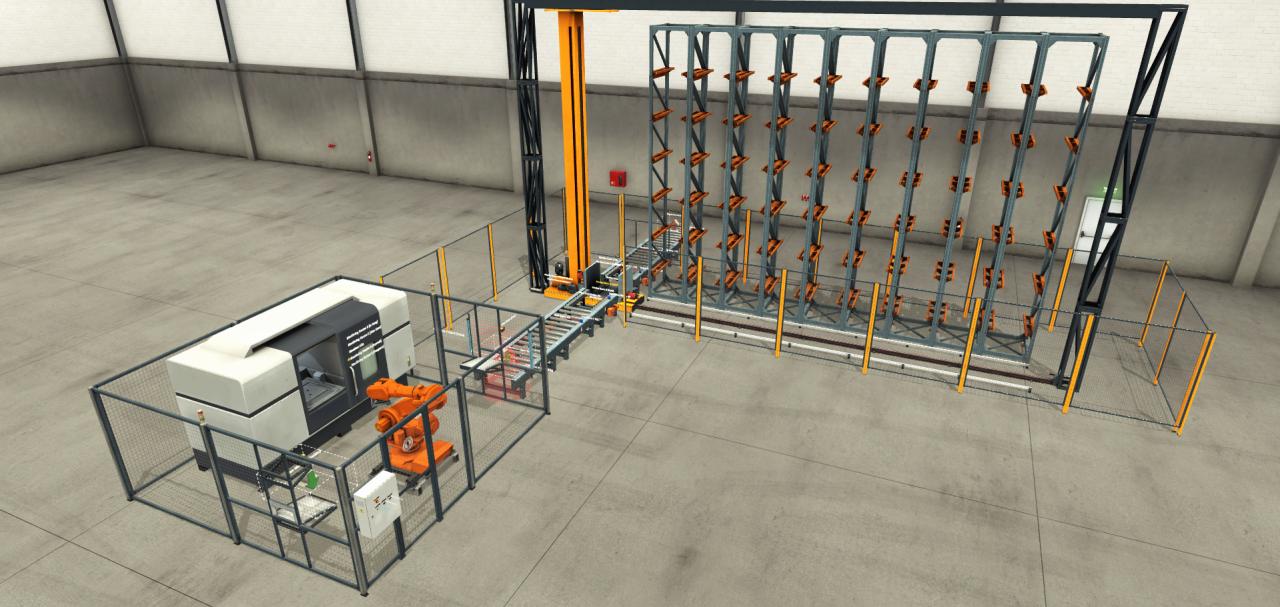
Robot Machining Center & AS/RS Automation System
Fully autonomous load → machine → store cycleArchitected an integrated robotic machining cell tied to an Automated Storage & Retrieval System (AS/RS): programmed Allen-Bradley PLC logic in Studio 5000 to coordinate a 6-axis robot, CNC machining center, and shuttle-based storage rack, with an OptixStudio HMI for recipe selection, live cycle tracking, and fault recovery. Modeled and validated the full material flow in Factory IO before deployment.
Read case study →
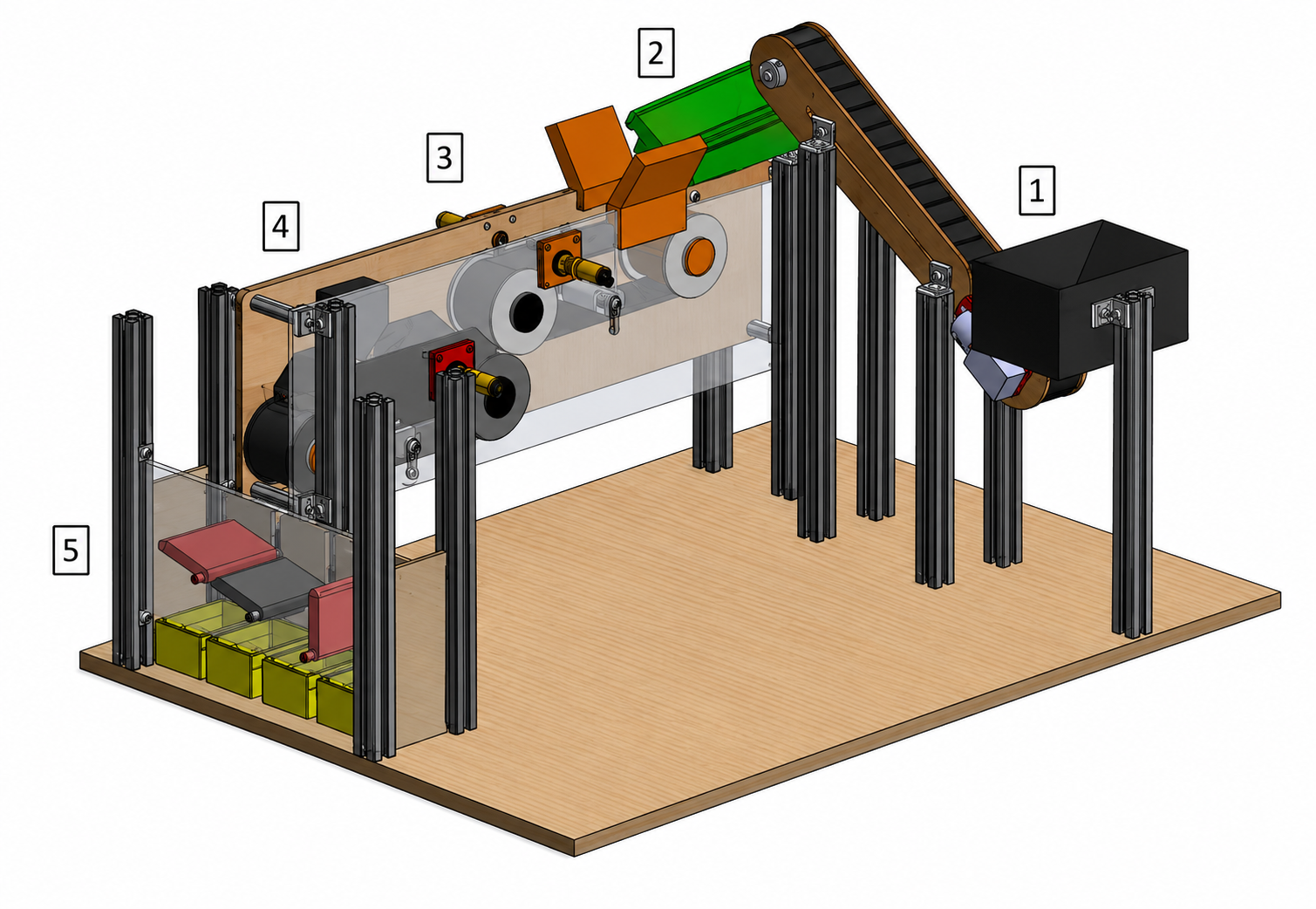
Electronic Component Sorting System
99% precision · 95% mAP@50Led a computer vision–based automated sorter: trained a YOLOv8 model on 3,000+ labeled images across four classes, then integrated a through-beam photoelectric sensor and Arduino Mega to trigger image capture, processing, and motor control for synchronized real-time sorting.
Read case study →

Jominy Hardness Testing Fixture
80% reduction in COPQLed a DMAIC-driven process optimization initiative , 5 Why and cause-and-effect root cause analysis, fixture redesign to reduce misfeeds, and Cp/Cpk capability work , to drive measurable improvements in stability and yield.
Read case study →
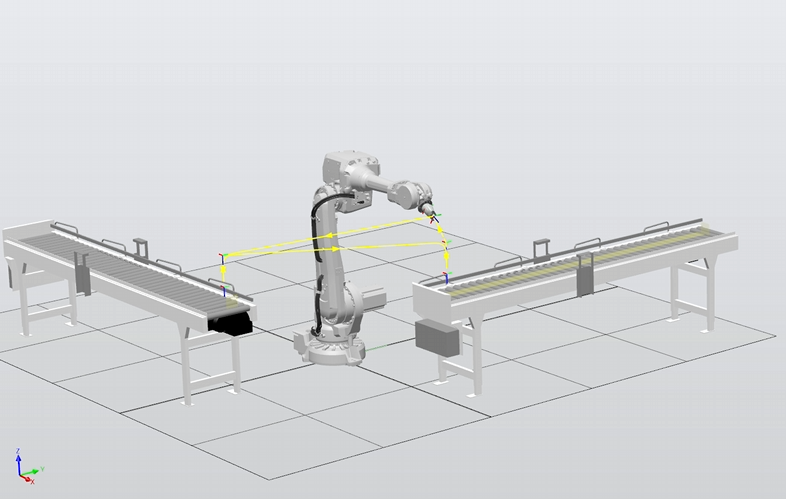
Automated Pick-and-Place Conveyor System
Continuous, repeatable pick-and-place cyclesBuilt an industrial automation simulation in ABB RobotStudio integrating a robotic arm, dual conveyor system, smart sensors, gripper controls, and digital signal logic. Developed RAPID programs and station logic to coordinate robot motion, part detection, gripping, conveyor movement, and repeatable automation cycles.
Read case study →