Case Study · 2025
Automated Pick-and-Place Conveyor System
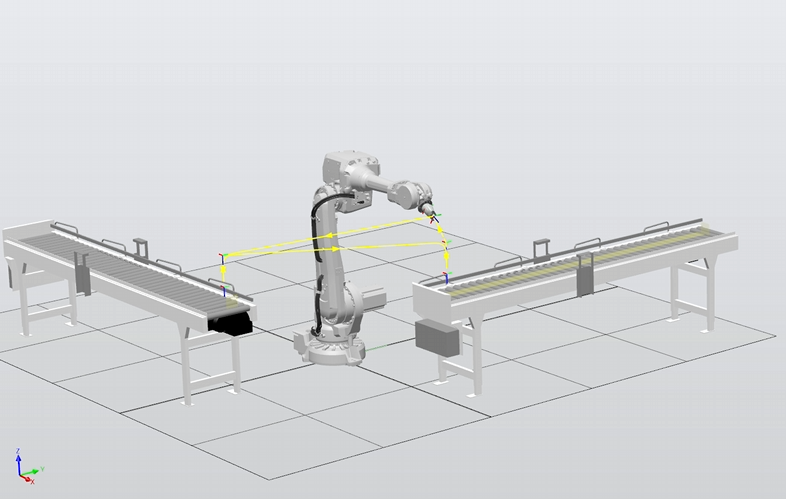
ABB RobotStudio simulation of a continuous pick-and-place cell
The Problem
Simulate an efficient industrial material handling process with continuous operation and automated part flow, coordinating a robot arm, conveyors, and sensors into a single repeatable cycle.
Approach
1 · Station layout
Modeled a dual-conveyor cell around an ABB robot in RobotStudio, with smart sensors positioned for part detection at pick and place locations and a gripper sized for the target parts.
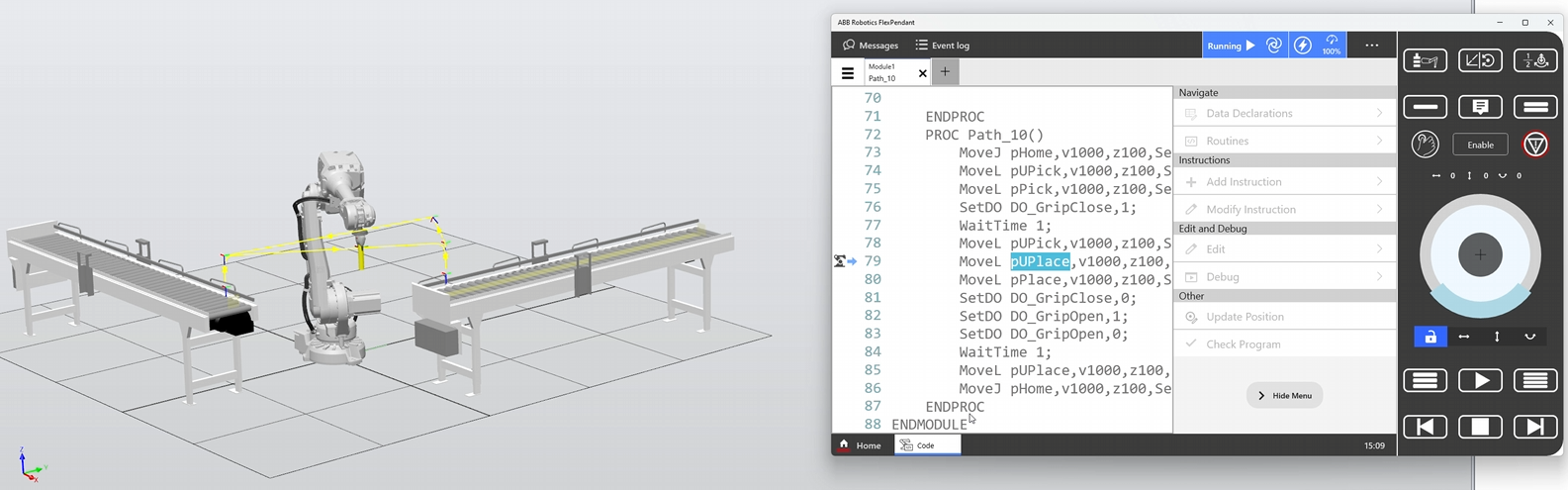
2 · RAPID programming
Wrote RAPID programs to drive robot motion, gripper open/close, and conveyor start/stop, structured so each step waits on the right digital input before advancing.
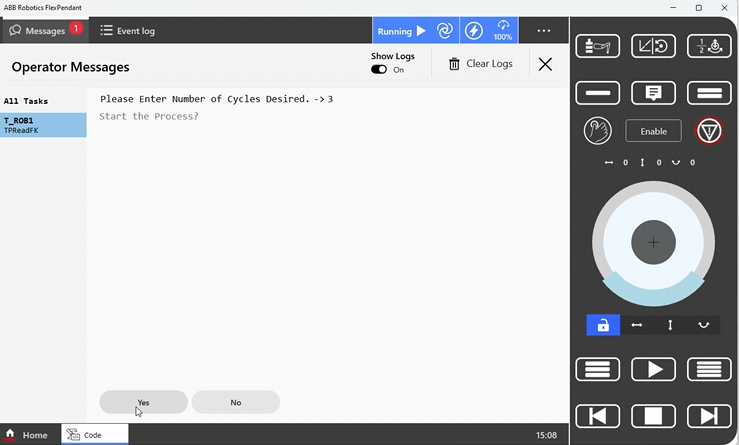
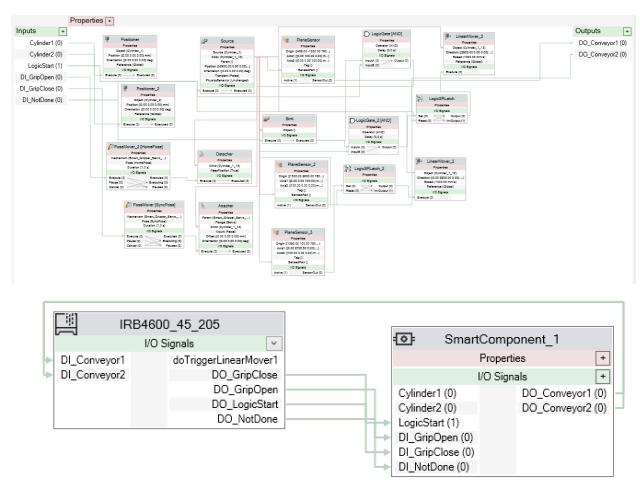
3 · Station logic & I/O
Wired digital signal logic between sensors, conveyors, and the robot controller so part detection triggers pickup, transfer, and release without manual intervention.
4 · Continuous cycle validation
Ran the cell through repeated cycles to confirm synchronized robot motion, conveyor control, and sensor-triggered automation held up over time, not just for a single pass.
Model Performance
Results
Continuous cycles
Multiple repeatable pick-and-place cycles ran end-to-end without intervention.
Synchronized motion
Robot, conveyors, and gripper stayed coordinated through sensor-driven handshakes.
Reliable simulation
Demonstrated industrial-style workflow and real-time automation control in RobotStudio.
What I Took Away
- Digital I/O design is what makes a simulation feel industrial , the robot is the easy part.
- RAPID is happiest when each motion waits on a real signal, not a timer.
- Repeatability is the deliverable , a cycle that only works once doesn't count.