Case Study · 2026
Electronic Component Sorting System
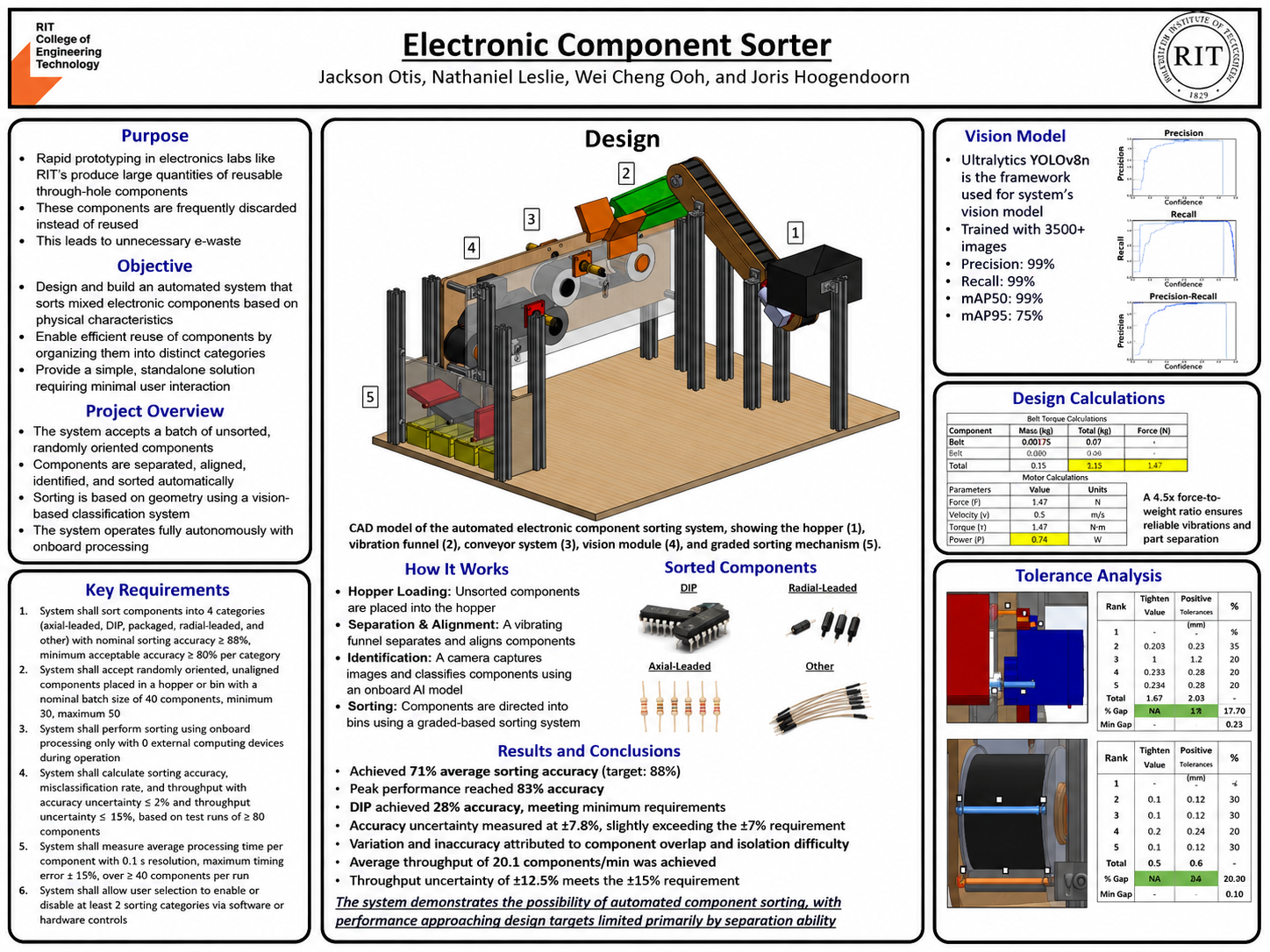
Computer vision–driven real-time sorter on a live conveyor
The Problem
Sort four classes of small electronic components flowing down a conveyor in real time, accurately enough to trust, fast enough to keep up with the belt, and with minimal environment effects.
Approach
1 · Dataset that matches the rig
Captured and hand-labeled 3,000+ images across four classes using the production camera, backdrop, and LED strip. The dataset's job was to look exactly like inference day.
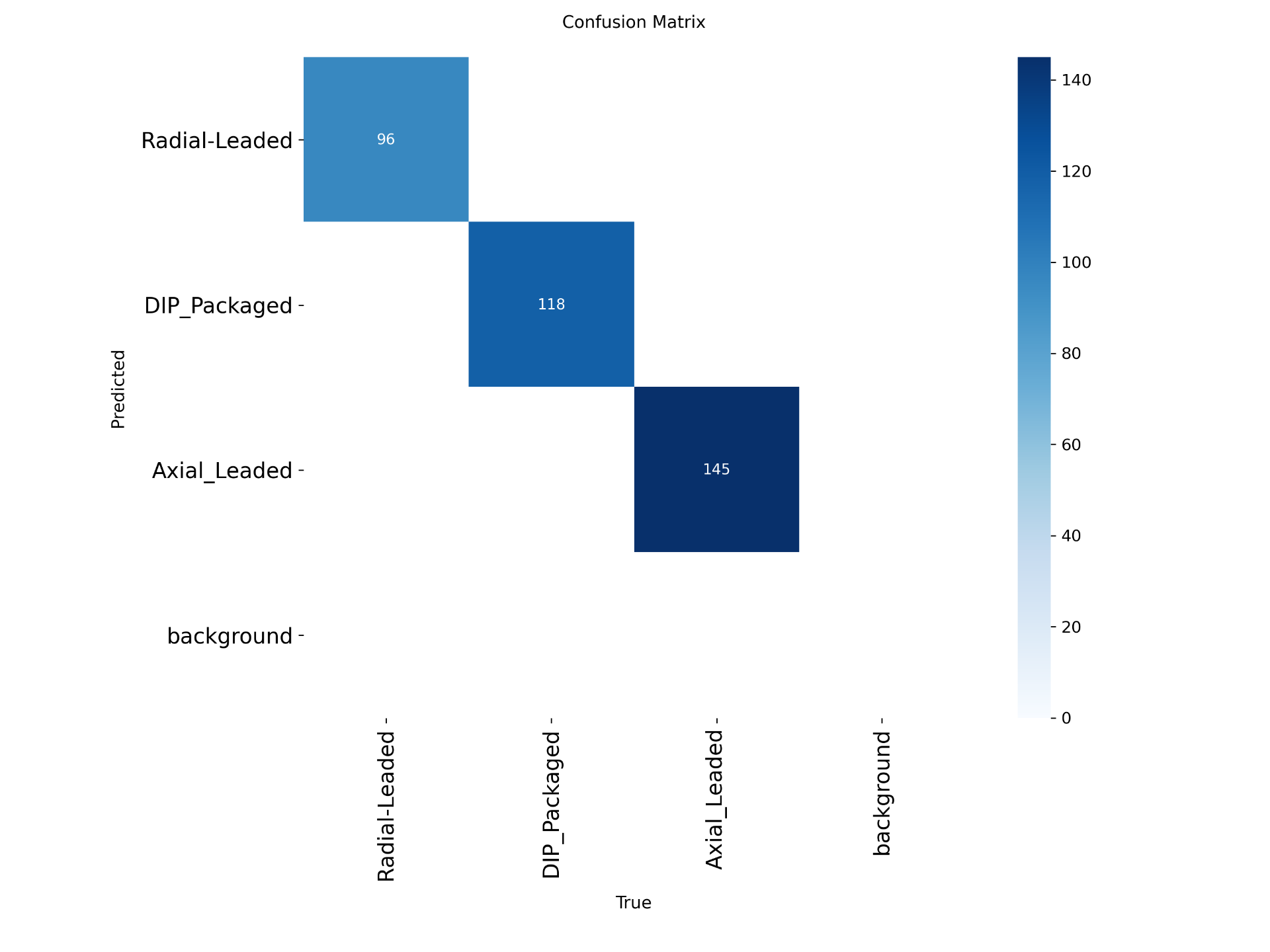
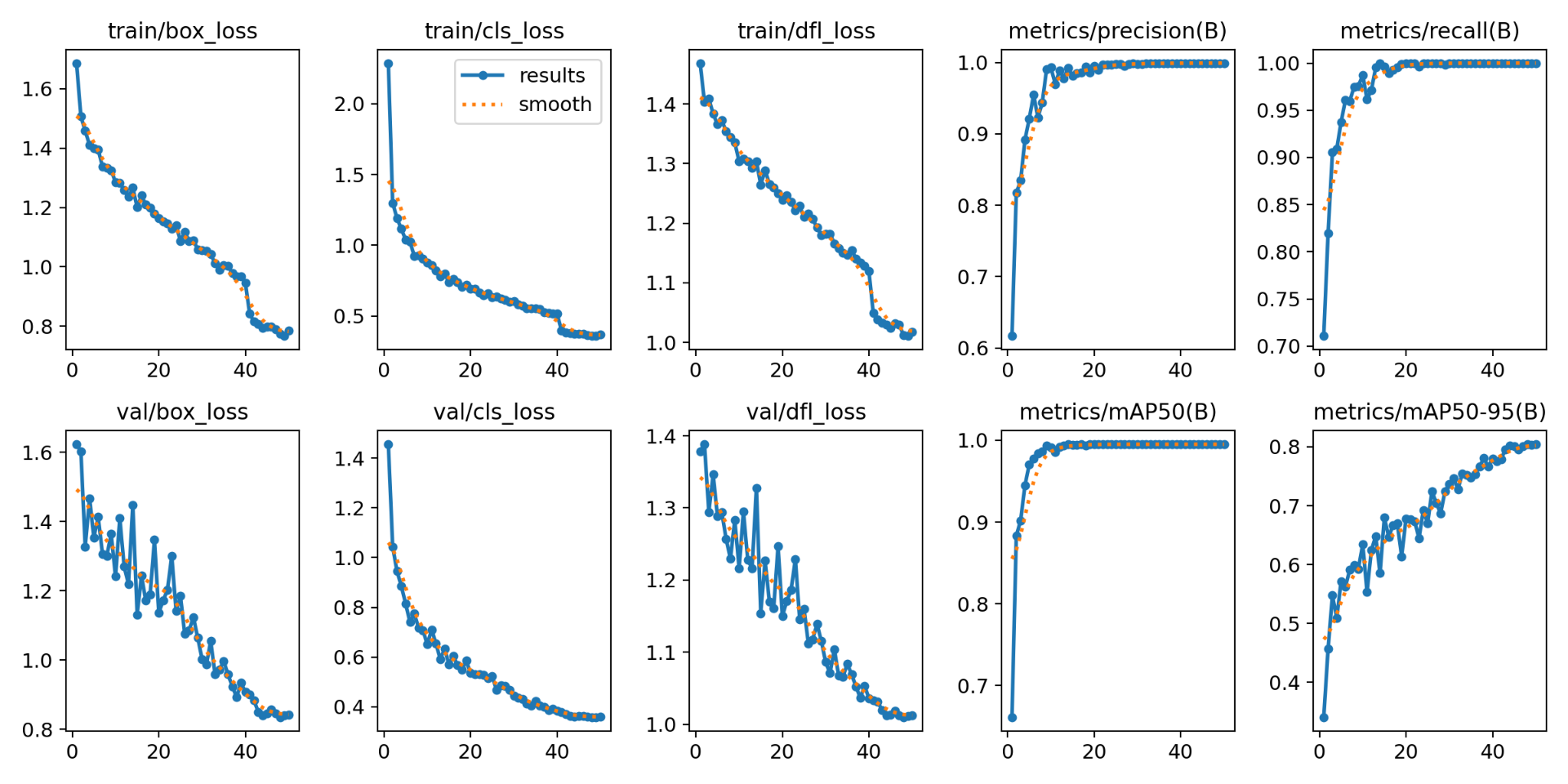
2 · YOLOv8 training & validation
Iterated on augmentation, image size, and class balance until precision and mAP@50 stabilized. Held back a cold-start test set captured on a different day to catch overfitting to lighting.
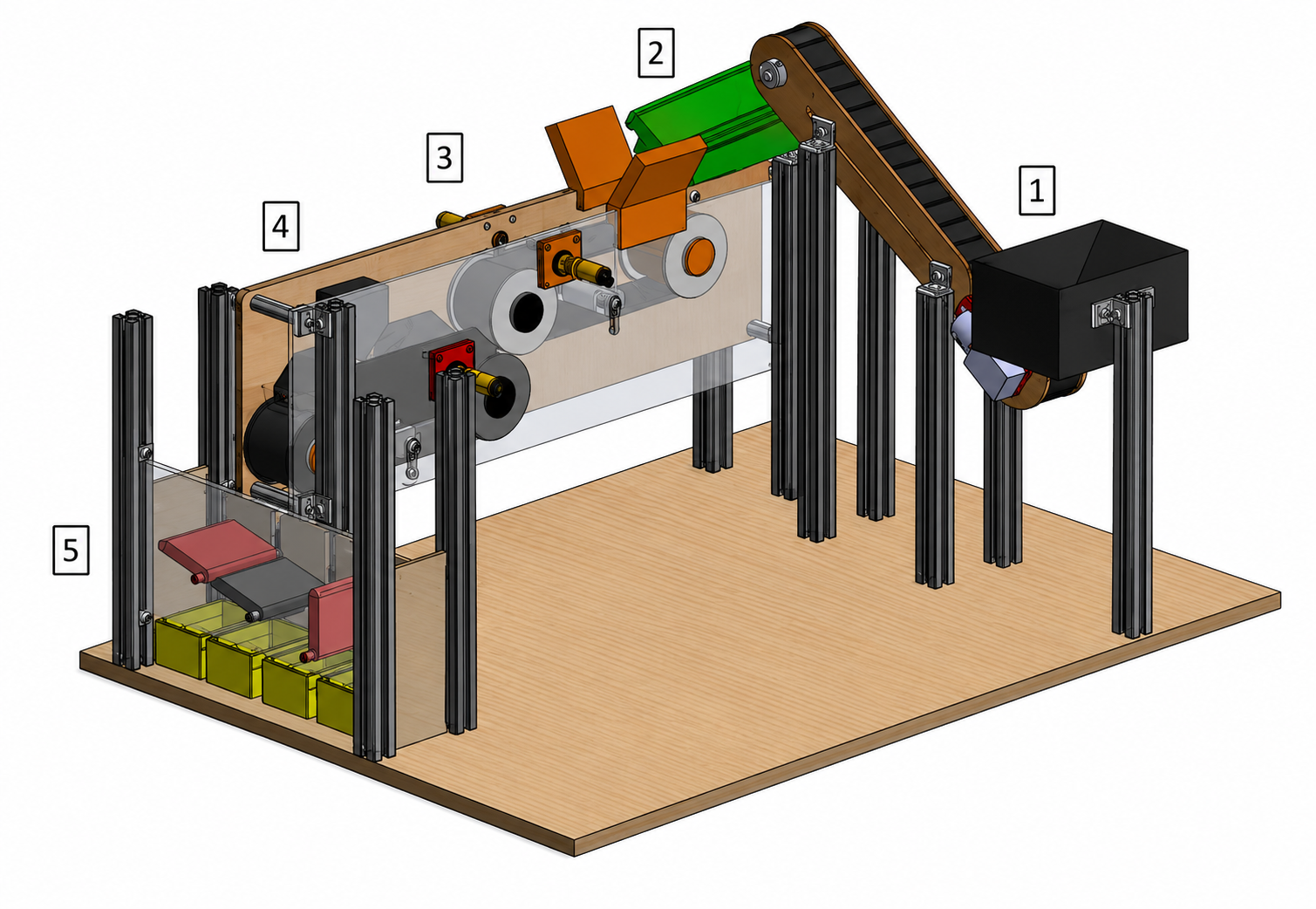
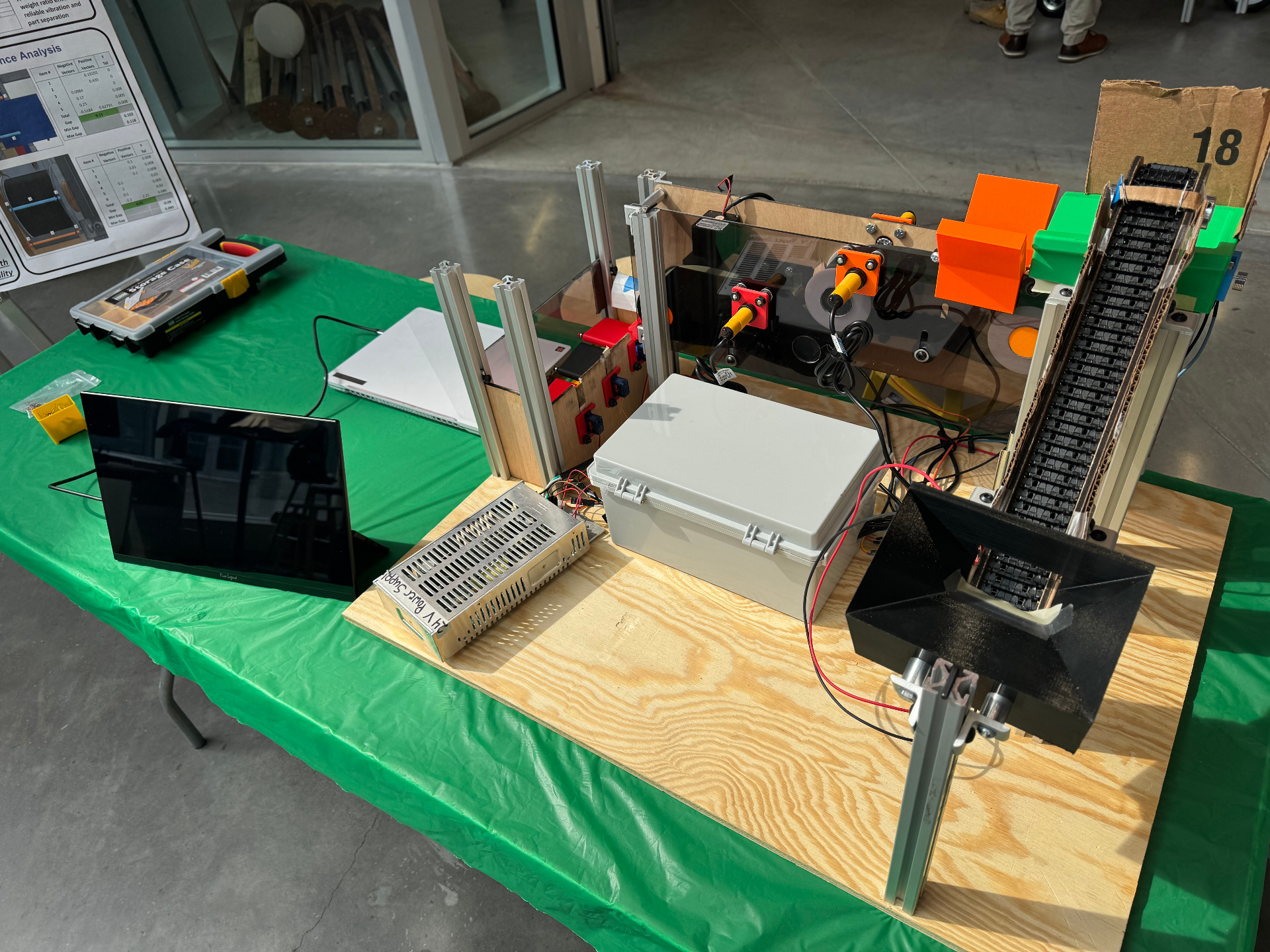
3 · Sensor-triggered pipeline
A through-beam photoelectric sensor triggers image capture the moment a part enters the field of view. Arduino Mega orchestrates capture, sends frames to the inference host, and drives the diverter motors based on the returned class.
4 · Arduino-driven actuation
Used an Arduino Mega as the microcontroller, wiring motors and sorting paddles directly to it. The Arduino actuates each paddle on pending signals from the photoelectric sensors, keeping the divert timing tightly coupled to part position on the belt.
Model Performance
Results
99%
Inference precision across all four classes.
95%
mAP@50 on the held-out cold-start test set.
Real-time
Synchronized capture → infer → divert on a moving belt.

What I Took Away
- Dataset > model: locking down lighting and camera geometry mattered more than any hyperparameter sweep.
- Sensor-triggered capture beats free-running cameras , fewer frames, less compute, better timing.
- Motion blur deserves its own failure mode in your evaluation, not a filter.